Nguyên lý điều khiển bơm tăng áp trực tiếp tích hợp biến tần

1. Đặt vấn đề
- Bài viết này nhằm mang tới một cái nhìn tổng quan việc điều khiển bơm tăng áp trực tiếp tích hợp biến tần, cấu hình đang dần trở nên phổ biến trong các thiết kế hệ thống cấp nước cho các tòa cao tầng nhà hiện nay.
- Công nghệ biến tần được áp dụng khá triệt để trong các dự án xây dựng dân dụng, mà giá trị cốt lõi mà chúng mang tới là việc giảm thiểu chi phí năng lượng, đem lại các thông số làm việc của hệ thống gần nhất với nhu cầu thực tế theo từng thời điểm của quá trình hoạt động của hệ thống.
- Biến tần được áp dụng khá phổ biến trong các ứng dụng HVAC như điều khiển bơm chiller, quạt của các bộ PAU, AHU hay tháp giải nhiệt… không dừng lại ở đó, gần dây, biến tần còn được áp dụng cho hệ thống cấp nước, mà điển hình là hệ thống phân phối nước trong tòa nhà. Tuy nhiên, không đơn giản như điều khiển hệ thống cấp nước truyền thống, hệ thống bơm tăng áp trực tiếp tích hợp biến tần cần một hệ thống điều khiển phức tạp hơn với yêu cầu một thuật toán tối ưu hơn, nhằm đảm bảo áp lực và lưu lượng mong muốn.
- Có lẽ, do phương pháp điều khiển này còn nhiều mới mẻ so với các hệ thống truyền thống, nên trong một số hồ sơ thiết kế, các đơn vị tư vấn thiết kế vẫn sử dụng cấu hình điều khiển các bơm này theo nguyên lý tương tự như các hệ thống bơm truyền thống khác, với các công tắc áp suất và điều khiển chạy/dừng bơm theo tín hiệu này, điều đó vô tình khiến hệ thống biến tần được trang bị trở nên vô nghĩa, mà khiến áp lực nước tới điểm sử dụng không thực sự được “mềm” như mong muốn.
- Với mong muốn có thể khái quát hóa một cách tổng quan về nguyên lý điều khiển bơm tăng áp trực tiếp tích hợp biến tần này, hi vọng bài viết có thể đem tới một cách hiểu rõ nét hơn.
[Tải bài viết đầy đủ dưới định dạng PDF tại đây]
1. Đặt vấn đề
- Bài viết này nhằm mang tới một cái nhìn tổng quan việc điều khiển bơm tăng áp trực tiếp tích hợp biến tần, cấu hình đang dần trở nên phổ biến trong các thiết kế hệ thống cấp nước cho các tòa cao tầng nhà hiện nay.
- Công nghệ biến tần được áp dụng khá triệt để trong các dự án xây dựng dân dụng, mà giá trị cốt lõi mà chúng mang tới là việc giảm thiểu chi phí năng lượng, đem lại các thông số làm việc của hệ thống gần nhất với nhu cầu thực tế theo từng thời điểm của quá trình hoạt động của hệ thống.
- Biến tần được áp dụng khá phổ biến trong các ứng dụng HVAC như điều khiển bơm chiller, quạt của các bộ PAU, AHU hay tháp giải nhiệt… không dừng lại ở đó, gần dây, biến tần còn được áp dụng cho hệ thống cấp nước, mà điển hình là hệ thống phân phối nước trong tòa nhà. Tuy nhiên, không đơn giản như điều khiển hệ thống cấp nước truyền thống, hệ thống bơm tăng áp trực tiếp tích hợp biến tần cần một hệ thống điều khiển phức tạp hơn với yêu cầu một thuật toán tối ưu hơn, nhằm đảm bảo áp lực và lưu lượng mong muốn.
- Có lẽ, do phương pháp điều khiển này còn nhiều mới mẻ so với các hệ thống truyền thống, nên trong một số hồ sơ thiết kế, các đơn vị tư vấn thiết kế vẫn sử dụng cấu hình điều khiển các bơm này theo nguyên lý tương tự như các hệ thống bơm truyền thống khác, với các công tắc áp suất và điều khiển chạy/dừng bơm theo tín hiệu này, điều đó vô tình khiến hệ thống biến tần được trang bị trở nên vô nghĩa, mà khiến áp lực nước tới điểm sử dụng không thực sự được “mềm” như mong muốn.
- Với mong muốn có thể khái quát hóa một cách tổng quan về nguyên lý điều khiển bơm tăng áp trực tiếp tích hợp biến tần này, hi vọng bài viết có thể đem tới một cách hiểu rõ nét hơn.
2. Các sơ đồ cấp nước điển hình
2.1. Sơ đồ cấp nước truyền thống và sơ đồ cấp nước sử dụng bơm tăng áp trực tiếp tích hợp biến tần
 |
 |
|
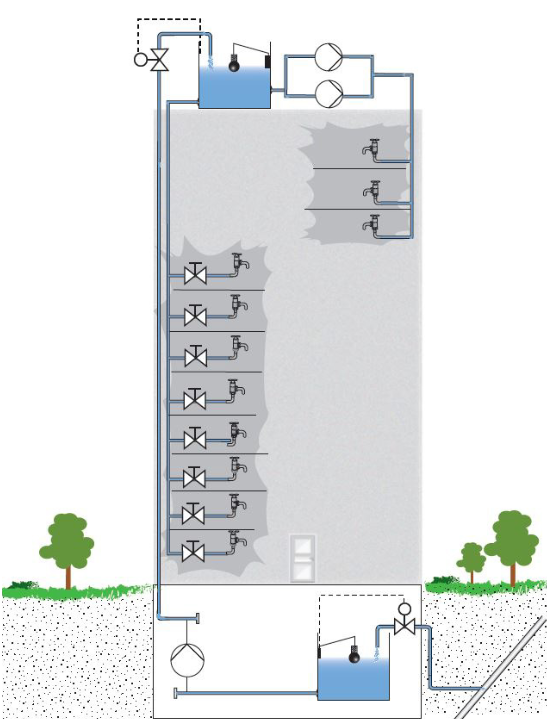
Sơ đồ cấp nước truyền thống: Sử dụng áp lực nước tự do cùng bể nước trung chuyển lớn đặt trên mái |
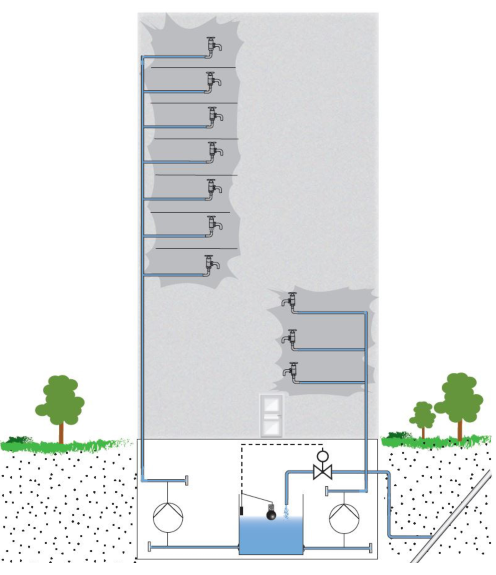
Sơ đồ cấp nước với bơm tăng áp trực tiếp tích hợp biến tần: Sự dụng một hoặc nhiều cụm bơm tích hợp biến tần để điều chỉnh lưu lượng, áp suất |
- Sơ đồ cấp nước truyền thống: Sơ đồ này vẫn được sử dụng trong hầu hết các dự án tại Việt Nam hiện nay, với cấu hình điển hình gồm: 02 bể chứa nước (01 bể nước trữ nước đặt dưới tầng hầm, 01 bể nước trung chuyển đặt tại tầng mái) và 02 cụm bơm (01 cụm bơm trung chuyển nước từ tầng hầm lên tầng mái, 01 cụm bơm tăng áp cho các tầng khối mái). Ưu điểm của cấu hình là sử dụng áp lực tự do nên áp lực trong hệ thống sẽ ít bị biến động hơn, ngoài ra, việc trữ nước tại tầng mái cũng giúp hệ thống không bị gián đoạn cấp nước trong một khoảng thời gian mất định nếu hệ thống điện bị ngắt. Tuy nhiên, cấu hình này không mang tới hiệu quả về sử dụng năng lượng, như: Lãng phí năng lượng, do phải luôn phải bơm một lượng nước khá lớn (khoảng 300m3 mõi ngày với một tòa nhà chung cư 300 căn hộ), rồi lại phải “thả áp lực” nước tự do xuống các tầng dưới, và để đảm bảo áp lực nằm trong phạm vi cho phép (không lớn hơn 5 bar), hệ thống phải cần tới các van giảm áp (việc sử dụng các van giảm áp này cũng gây ra thất thoát năng lượng), ngoài ra việc trang bị thêm bể nước trên mái cũng gây phát sinh chi phí đầu tư cả về không gian lắp đặt lẫn giải pháp kết cấu…
- Sơ đồ cấp nước với bơm tăng áp trực tiếp tích hợp biến tần: Gần đây, với sự phát triển nhanh chóng của công nghệ biến tần, cũng như độ tin cậy của lưới điện cũng ổn định hơn, thì việc ứng dụng giải pháp bơm tăng áp trực tiếp tích hợp biến tần dần trở lên phổ biến hơn. Có thể mô tả một hệ thống bơm tăng áp trực tiếp tích hợp biến tần một các giản đơn như sau: Hệ thống chỉ cần 01 bể nước dự trữ (hoặc ở các quốc gia có độ tin cậy cấp nước của thành phố ổn định chúng ta cũng không cần tới bể nước này), và một cụm bơm tăng áp trực tiếp (gồm nhiều bơm được lắp đặt song song) tích hợp biến tần cùng một thuật toán điều khiển tối ưu hóa giúp ổn định áp lực cấp tới hệ thống.
2.2. Một số sơ đồ cấp nước sử dụng bơm tăng áp trực tiếp tích hợp biến tần
|
 |
 |
|
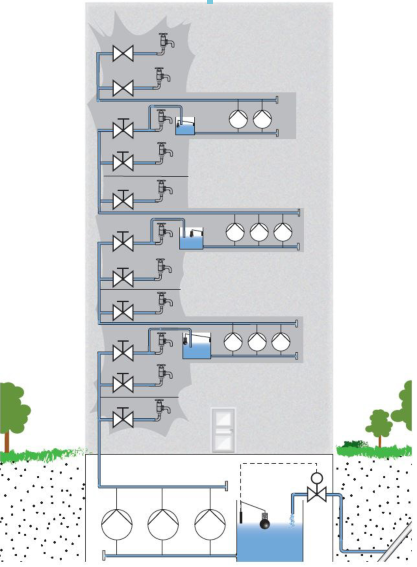
Sơ đồ cấp nước với các vùng phân áp trực tiếp từ bể nước |
Sơ đồ cấp nước với nhiều vùng phân áp, sử dụng bể nước trung chuyển |
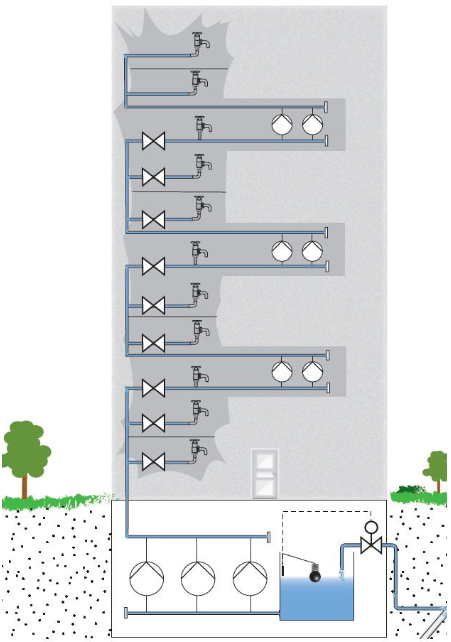
Sơ đồ cấp nước với nhiều vùng phân áp, sử dụng các cụm bơm tăng áp chuyển tiếp |
|
Áp dụng với các tòa nhà cao tầng (dưới 25 tầng) |
Áp dụng với các tòa nhà siêu cao tầng hoặc các công trình phân cấp thành nhiều khu vực nối tiếp nhau. |
Áp dụng với các tòa nhà siêu cao tầng hoặc các công trình phân cấp thành nhiều khu vực nối tiếp nhau. |
2.3. Ưu điểm sử dụng bơm tăng áp trực tiếp tích hợp biến tần
- Giảm chi phí vòng đời của bơm: Bao gồm chi phí đầu tư ban đầu, chi phí năng lượng, chi phí vận hành. Do: Bơm không phải đóng/mở liên tục, bơm không phải luôn hoạt động với công suất tối đa ngay cả khi áp lực đã gần đạt được yêu cầu.
- Tiết kiệm năng lượng: Hệ thống hoạt động ngay tại với lưu lượng sử dụng thấp mà vẫn duy trì được áp lực cần thiết, không bị lãng phí năng lượng cho việc phải bơm nước lên cao, hay phải giảm áp qua hệ thống van giảm áp, hoặc phải tích trữ vào trong các bình tích áp cỡ lớn.
- Lưu lượng sử dụng của hệ thống luôn biến đổi theo nhu cầu sử dụng nước thực tế, vì vậy, với đặc tính của mình, hệ thống biến tần cần một thuật toán điều khiển tối ưu (PID) giúp luôn duy trì được áp lực cần thiết mà động cơ không phải hoạt động với tối đa công suất.
- Giảm tổng lưu lượng lựa chọn của cụm bơm, như chúng ta biết, hệ thống bơm nước truyền thống thường được chọn với mức dự phòng 2 bơm với lưu lượng 100%-100%, với hệ thống sử dụng biến tần, do hệ thống có thể điều chỉnh được lưu lượng, vì vậy, chúng ta có thể lựa chọn các cụm bơm, với tỉ lệ dự phòng nhỏ hơn mà vẫn đáp ứng yêu cầu của hệ thống, như 65%-65%, 50%-50%-20% hay 40%-40%-40%.
- Hệ thống điều khiển tiết kiệm năng lượng hiệu quả hơn: Hầu hết các nhà sản xuất biến tần điều tích hợp các thuật toán (firmware) trong thiết bị của mình, cho phép tối ưu hóa việc điều khiển hệ thống cụm bơm biến tần cho rất nhiều ứng dụng khác nhau. Các thuật toán này được xây dựng nhằm điều chỉnh mềm hóa tốc độ, từ đó cho phép hệ thống luôn duy trì được một áp lực cài đặt cố định, với lưu lượng biến đổi. Một trong các thuật toán thông dụng là việc ứng dụng PID trong điều khiển. Ngoài ra, thuật toán điều khiển cũng cho phép, san đều thời gian hoạt động của các bơm, biến tần, giúp kéo dài tuổi thọ của cụm bơm.
- Lựa chọn bơm linh hoạt hơn: như chúng ta biết, dựa trên đường đặc tính của bơm, bơm sẽ hoạt động hiệu quả nhất ở 1 điểm tối ưu, tuy nhiên, không phải lúc nào điểm làm việc này cũng trùng với điểm hoạt động của hệ thống, như chúng ta mong muốn. Mặt khác, do lưu lượng yêu cầu của hệ thống cũng khác nhau theo từng thời điểm khác nhau, khiến các đường đặc tính của bơm cũng thay đổi. Việc lựa chọn biến tần, cho phép ta lựa chọn bơm linh hoạt hơn mà không sợ đặc tính của hệ thống thay đổi.
- Giảm hiện tượng búa nước trong hệ thống.
- Giảm hiện tượng nhiễu cho điện lưới (sụt áp).
- Tăng khả năng dự phòng lưu lượng cho hệ thống.
- Giảm hiện tượng sóng hài trên lưới điện.
- Dễ dàng thay đổi áp lực cài đặt cho hệ thống nếu có yêu cầu trong quá trình vận hành.
- Dễ dàng truyền thông với các hệ thống điều khiển khác, như BMS.
3. Nguyên lý điều khiển bơm tăng áp trực tiếp tích hợp biến tần
3.1. Sơ đồ hệ thống
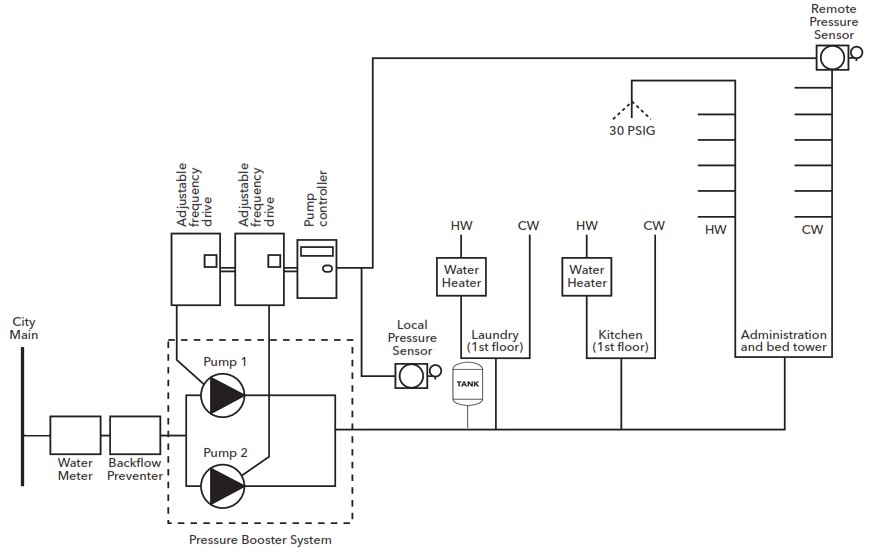
Sơ đồ nguyên lý bơm tăng áp trực tiếp tích hợp biến tần điển hình
Để điều khiển bơm tăng áp trực tiếp tích hợp biến tần chúng ta cần tới một số các thiết bị sau:
- Cụm bơm tăng áp: có thể lựa chọn cụm bơm với nhiều bơm được mắc song song với nhau, sử dụng càng nhiều các bơm nhỏ sẽ giúp áp lực điều khiển được mềm hơn, tuy nhiên việc này cũng dẫn tới việc chi phí đầu tư lớn hơn, cần có một phương án so sánh tổng thể về việc lựa chọn số lượng bơm hiệu quả.
- Biến tần: tối ưu điều khiển có thể áp dụng mỗi một bơm thì cần tới 01 biến tần độc lập, tuy nhiên, ở một số cấu hình tối ưu về chi phí hơn, có thể sử dụng một số bơm khởi động thông thường (on/off) và một số bơm tích hợp biến tần nhằm giảm thiểu chi phí, hoặc sử dụng sơ đồ 1 biến tần áp dụng cho 02 bơm có cùng thông số.
- Cảm biến áp suất: (lưu ý rằng, không nên sử dụng công tắc áp suất, việc sử dụng công tắc áp suất có thể áp dụng cho một số mô hình nhỏ, giản đơn), cảm biến áp suất có thể đặt tại vị trí gần với với cụm bơm, hoặc tối ưu hơn, cảm biến áp suất nên được đặt tại điểm bất lợi về áp lực nhất, nhằm giúp điều khiển bơm tối ưu về hiệu suất hơn.
- Bình tích áp: về lý thuyết, biến tần có thể điều chỉnh tốc độ từ 0Hz tới 50Hz, tuy nhiên, ở các dải tần số thấp thì đường đặc tính làm việc của bơm không chính xác như kỳ vọng, ngoài ra, việc phải bật/ tắt bơm trong khoảng thời gian quá ngắn cũng khiến tuổi thọ của bơm bị ảnh hưởng, vì vậy, ngay cả với hệ thống bơm tăng áp trực tiếp chúng ta vẫn cần tới bình tích áp, tất nhiên, kích thước của chúng sẽ nhỏ hơn rất nhiều so với bình tích áp của hệ thống tích áp truyền thống.
3.2. Nguyên lý điều khiển
- Việc điều khiển cụm bơm tăng áp trực tiếp tích hợp biến tần khá phức tạp, dưới đây là một mô tả khái quát quá trình này để chúng ta có thể hiểu một cách cơ bản nguyên lý điều khiển này, chi tiết hơn sẽ thuộc phạm vi của các nhà sản xuất tủ điện, khi đó bạn sẽ phải hiểu hơn về bộ điều khiển PID được tích hợp trong các PLC (đề cập ở phần bên dưới).
- Điều khiển bơm (tốc độ động cơ, gọi thêm/xa thải bơm) dựa trên tín hiệu áp suất đặt tại đầu đẩy của cụm bơm. Nguyên tắc: Áp lực cố định. Tăng lưu lượng: Ưu tiên tăng tốc độ trước, sau đó nếu không đủ gọi thêm bơm. Giảm lưu lượng: Ưu tiên giảm tốc độ trước, sau đó nếu không đủ xa thải bơm.
- Bơm còn hoạt động ở hiệu suất tốt, cột áp và đường cong đặc tính không bị biến động, trong khoảng 0.7~1.0 tốc độ danh nghĩa (tức là tần số không nên giảm quá 30Hz~50Hz) không nên để tần số xuống thấp quá, vì cột áp tỉ lệ với lũy thừa bậc ba của tốc độ động cơ, khi đó biến thiên áp lực điều khiển sẽ có biên độ điều chỉnh rất lớn.
- Nguyên lý điều khiển cột áp cố định nằm trong bộ điều khiển PID (thuật toán) trên PLC, thuật toán cho phép điều chỉnh tham số của động cơ để bám theo áp lực cố định mong muốn, mà quyết định tăng/giảm tốc độ, hay gọi thêm/ xa thải bơm. Nó dựa trên các tham số chính, tín hiệu áp suất từ cảm biến, DeltaP cài đặt (nếu vượt quá DeltaP mà áp lực không tới điểm kỳ vọng thì sẽ điều chỉnh tốc độ, số lượng bơm), DeltaT thời gian phản hồi để ra lệch điều chỉnh thông số điều khiển…
- Do các các bơm được lắp đặt song song trên cùng 1 đường ống gom (header), nên các cột áp của các bơm phải gần tương đồng nhau, vì vậy cần phải khống chế DeltaF (tần số). Không nên điều chỉnh các tần số của các bơm đang cùng hoạt động lệch nhau, vì điều đó có thể gây nên hiện tượng “rối dòng”, hoặc ảnh hưởng tới đặc tính từng bơm. Nếu lệch nhau quá lớn có thể gây hỏng bơm ở bơm có tần số thấp hơn (do không đẩy được nước qua van một chiều được).
- Mặc dù được trang bị biến tần, hệ thống vẫn cần trang bị một bình tích áp nhỏ, việc này giúp áp lực không bị gián đoạn (trong khoảng 20s) khi gọi thêm bơm, hay xa thải bơm. Việc trang bị bình tích áp ở đây cũng giúp hệ thống hoạt động mềm hơn.
- Về lý thuyết, cảm biến áp suất nên được đặt ở điểm xa nhất, bất lợi nhất của hệ thống. Khi đó việc điều chỉnh áp lực sẽ mềm hơn và tiết kiệm năng lượng hơn.
- Hầu hết các hãng biến tần đều có firmware sẵn tích hợp trong thư viện của thiết bị, ứng dụng cho bơm tăng áp trực tiếp, chúng ta có thể tham khảo các nhà sản xuất biến tần để áp dụng cho các mô hình giản đơn, với các mô hình lớn, chúng ta cần tới bộ điều khiển phức tạp hơn như PLC chẳng hạn.
- Do áp lực của hệ thống có thể được thay đổi bằng việc gọi thêm hay sa thải bơm, vì vậy để tránh hiện tượng quá áp nhằm bảo về đường ống và thiết bị, hệ thống nên được trang bị các biện pháp chống quá áp như: lắp đặt thêm van giảm áp, công tắc áp lực…
3.3. Một số quan niệm chưa chính xác
- Điều khiển theo nguyên lý áp suất đo được thấp thì chạy bơm, áp suất lớn thì dừng bơm: Đây là một sai lầm khá phổ biến. Nguyên lý này thường được áp dụng cho hệ thống bơm chữa cháy, khi hệ thống này ưu tiên mức độ an toàn, không cần duy trì áp lực, có hệ thống xả áp quay ngược về bể chữa cháy. Với hệ thống nước, chúng ta cần tới việc phải duy trì áp lực mềm hơn, hơn nữa, việc điều khiển trên khiến trang bị biến tần trở nên không cần thiết. Việc điều khiển trên có thể chỉ áp dụng trong phạm vi nhỏ với hệ thống bơm tăng áp không tích hợp biến tần kết hợp với một bình tích áp lớn.
- Điều khiển cực đoan theo áp lực mong muốn: Đây cũng là một sai lầm phổ biến, chúng ta biết rằng áp lực trong hệ thống luôn biến đổi mỗi khi có thiết bị tiêu thụ nước hoặc tăng giảm số lượng bơm, tốc độ bơm, vì vậy tín hiệu trả về từ cảm biến áp suất cũng luôn thay đổi, chỉ cần tăng tốc độ của bơm, thì các thông số lưu lượng áp lực đo được cũng thay đổi theo, khiến áp suất trả về bị tăng gián đoạn, nếu chúng ta điều khiển để giảm bơm tức thì, thì không đạt được áp lực mong muốn, khiến hệ thống bị dao động không ngừng việc thay đổi tốc độ, số lượng bơm bị thay đổi liên tục. Để tối ưu hóa việc điều khiển này, chúng ta cần tới bộ điều khiển PID, đây là bộ điều khiển kinh điển trong hệ thống điều khiển và được tích hợp trong hầu hết các PLC, các bộ điều khiển.
3.4. Một số vấn đề cần lưu ý
- Vị trí đặt cảm biến áp suất: Thông thường cảm biến áp suất được đặt tại gần vị trí cụm bơm trên đường ống đẩy (header) của bơm. Ưu điểm của cách lắp đặt này giúp thuận tiện trong quá trình thi công, bảo trì hệ thống được tập trung tại một vị trí mà ít ảnh hưởng tới các khu vực khác. Tuy nhiên, một cách tối ưu hơn, cảm biến áp suất này nên được đặt tại vị trí bất lợi nhất về áp lực, gần với điểm sử dụng nước, việc này sẽ giúp hệ thống hoạt động “mượt mà” hơn, cũng như đảm bảo tốt hơn về tiện nghi sử dụng, giảm gián đoạn về áp suất, ngoài ra, việc đặt cảm biến ở điểm bất lợi nhất còn giúp giảm thiểu áp lực dư thừa tại bơm, giúp giảm chi phí năng lượng tiêu thụ. Nhược điểm của phương pháp này là vị trí lắp đặt xa khu vực kỹ thuật sẽ dẫn tới việc khó bảo trì.
- Bình tích áp: Nhiều quan niệm chưa phù hợp, cho rằng khi sử dụng biến tần thì hệ thống không cần tới bình tích áp. Mặc dù biến tần cho phép điều khiển tốc độ của động cơ từ 0Hz tới 50Hz, tuy nhiên, như chúng ta biết, cấu tạo cơ khí của bơm chỉ cho phép chúng giữ đường đặc tính (Q, H) của mình trong một khoảng biến thiên tốc độ nhất định của động cơ, ở các dải tần số thấp, bơm không còn đáp ứng được lưu lượng và cột áp như ý muốn. Hơn hết, việc không có bình tích áp, sẽ khiến bơm phải chạy/ dừng liên tục, điều đó cũng ảnh hưởng tới tuổi thọ của bơm và biến tần. Tất nhiên, kích thước của của bình tích áp của hệ thống bơm tăng áp sử dụng biến cũng yêu càu một thể tích nhỏ hơn, chỉ đủ để giúp bơm không phải khởi động quá nhiều lần, và “đệm” một khoảng thời gian đủ để tránh gián đoạn áp lực. Việc lựa chọn bình tích áp này phụ thuộc vào thời gian DeltaT của khởi động bơm, lưu lượng tính toán, và thông số của bơm nhỏ nhất trong cụm bơm biến tần.
- Bảo vệ chống quá áp: Việc sử dụng nhiều bơm đấu song song, giúp hệ thống có tính dự phòng cao, thông thường, tổng lưu lượng của cụm bơm này sẽ tương đương 120%~150% lưu lượng định mức của hệ thống. Vì vậy, với một lưu lượng sử dụng thấp, nếu xảy ra sai xót trong thuật toán điều khiển, hoặc thao tác ở chế độ thủ công, hệ thống có thể bị quá áp, gây ra hỏng hóc (vỡ) đường ống, thiết bị sử dụng. Để đảm bảo hệ thống thống không bị quá áp, chúng ta có thể cân nhắc một trong các giải pháp sau (các giải pháp an toàn hơn được xếp theo thứ tự tăng dần):
- Sử dụng thông số đo được từ cảm biến áp suất để khống chế dừng khẩn cấp hoặc giảm cực đoan tốc độ của bơm nhằm đảm bảo áp suất không vượt quá yêu cầu trong mọi trường hợp
- Trang bị công tắc áp suất tại đường ống dẩy của cụm bơm, khống chế áp lực tối đa của hệ thống bằng cách khóa chéo trong mạch điều khiển điện.
- Trang bị van giảm áp tại đường ống đẩy của cụm bơm, khống chế áp lực tối đa trong phạm vi tính toán.
- Lựa chọn số lượng cụm bơm và bơm: Việc lựa chọn số lượng bơm cũng khá phức tạp, chúng ta cần xem xét song hành giữa chỉ số về kỹ thuật và chi phí đầu tư. Càng nhiều bơm với công suất nhỏ sẽ giúp hệ thống hoạt động mượt và có tính dự phòng cao hơn, tuy nhiên, điều đó cũng khiến chi phí đầu tư lớn. Với các cụm bơm cho các tòa nhà quy mô trung bình (300 phòng khách sạn) chúng ta có thể lựa chọn cấu hình với 3 bơm: 50%-50%-20% hoặc 50%-50%-50% lưu lượng, với các tòa nhà cao tầng, chúng ta có thể cân nhắc chia thành nhiều cụm bơm nhỏ cấp cho từng cụm phân áp khác nhau, với các tòa nhà siêu cao tầng, chúng ta có thể cân nhắc giải pháp bơm nước bậc thang với các bể trung chuyển đặt tại các tầng chuyển kỹ thuật, hoặc sử dụng các bơm tăng áp trung chuyển nối tiếp.
- Van giảm áp: Một việc khá phổ biến là trong các thiết kế thường sử dụng quá nhiều van giảm áp, về lý thuyết, việc trang bị quá nhiều van giảm áp sẽ gây ra lãng phí năng lượng, sẽ khiến chi phí vận hành tăng thêm, vì vậy, một thiết kế tối ưu cần hạn chế việc sử dụng quá nhiều cụm van giảm áp, chúng ta cần sử dụng linh hoạt hơn việc phân chia khu vực cấp nước, sử dụng các cụm bơm nối tiếp…
4. Bộ điều khiển PID
4.1. Khái niệm về bộ điều khiển PID
- PID là viết tắt của từ Proportional Integral Derivative. Có thể hiểu PID là một cơ chế phản hồi của vòng điều khiển. Được dùng ở hầu hết các loại thiết bị máy móc công nghiệp. Có thể bạn chưa biết điều khiển PID được sử dụng nhiều nhất trong tất cả các loại điều khiển phản hồi.
- PID được sử dụng để tính toán các giá trị sai số. Hiểu đơn giản thì nó là hiệu số giữa giá trị đo thông số biến đổi và giá trị đặt theo yêu cầu. PID Controller sẽ thực hiện giảm tối đa các sai số bằng phương pháp điều chỉnh các giá trị ở đầu vào.
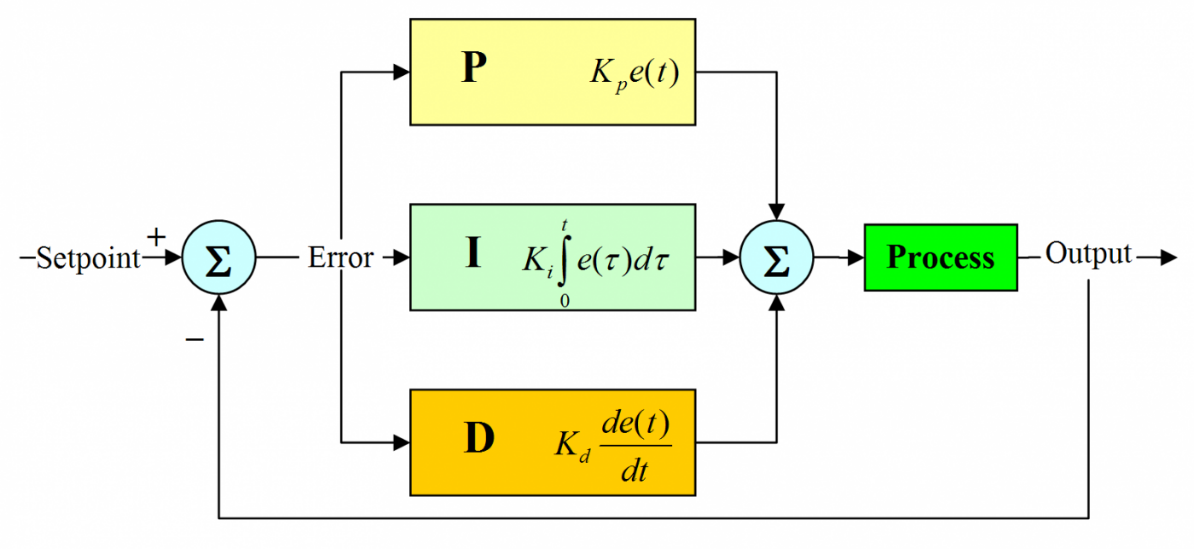
- PID là sự kết hợp của 3 bộ điều khiển: tỉ lệ, tích phân và vi phân, có khả năng điều chỉnh sai số thấp nhất có thể, tăng tốc độ đáp ứng, giảm độ vọt lố, hạn chế sự dao động.
- Bộ điều khiển PID hay chỉ đơn giản là PID là một kỹ thuật điều khiển quá trình tham gia vào các hành động xử lý về “tỉ lệ, tích phân và vi phần”. Nghĩa là các tín hiệu sai số xảy ra sẽ được làm giảm đến mức tối thiểu nhất bởi ảnh hưởng của tác động tỉ lệ, ảnh hưởng của tác động tích phân và được làm rõ bởi một tốc độ đạt được với tác động vi phân số liệu trước đó.
- Một cách đơn giản nhất để hiểu về PID như sau:
- P: là phương pháp điều chỉnh tỉ lệ, giúp tạo ra tín hiệu điều chỉnh tỉ lệ với sai lệch đầu vào theo thời gian lấy mẫu.
- I: là tích phân của sai lệch theo thời gian lấy mẫu. Điều khiển tích phân là phương pháp điều chỉnh để tạo ra các tín hiệu điều chỉnh sao cho độ sai lệch giảm về 0. Từ đó cho ta biết tổng sai số tức thời theo thời gian hay sai số tích lũy trong quá khứ. Khi thời gian càng nhỏ thể hiện tác động điều chỉnh tích phân càng mạnh, tương ứng với độ lệch càng nhỏ.
- D: là vi phân của sai lệch. Điều khiển vi phân tạo ra tín hiệu điều chỉnh sao cho tỉ lệ với tốc độ thay đổi sai lệch đầu vào. Thời gian càng lớn thì phạm vi điều chỉnh vi phân càng mạnh, tương ứng với bộ điều chỉnh đáp ứng với thay đổi đầu vào càng nhanh.
4.2. Ứng dụng điển hình của bộ điều khiển PID
- Điều khiển PID là một kiểu điều khiển có hồi tiếp vòng kín được sử dụng rộng rãi trong hệ thống điện, tự động hóa, điện tử…
- Hiện nay PID được ứng dụng trong rất nhiều ngành nghề khác nhau. Nó có thể được dùng để giảm các sai số, hạn chế sự dao động hay là giảm thời gian gian xác lập và độ vọt lố…
- Sử dụng để điều khiển mực nước: bộ điều khiển được tự động hóa nhờ vào các thiết bị điện tử như cảm biến, van điều khiển…
- Kiểm soát lưu lượng khí, chất lỏng qua đường ống
- Điều khiển cố định thông số cài đặt (lưu lượng, cột áp…) cho các thiết bị chấp hành như: Quạt, bơm, van gió gắn động cơ, van nước điều khiển…
- Điều khiển PID trong PLC: PLC thường được thiết kế sẵn các hàm dùng để điều chỉnh nhiệt độ, áp suất, lưu lượng…
Write a comment