So sánh động cơ đồng bộ và động cơ không đồng bộ

Động cơ đồng bộ và động cơ không đồng bộ là hai loại động cơ điện phổ biến, có những khác biệt cơ bản về nguyên lý hoạt động, cấu tạo và ứng dụng.
Động cơ đồng bộ có tốc độ quay bằng với tốc độ từ trường quay, không phụ thuộc vào tải. Rotor của loại động cơ này có thể là dây quấn cần cấp nguồn kích từ hoặc nam châm vĩnh cửu. Do tốc độ không đổi và hiệu suất cao, động cơ đồng bộ thường được sử dụng trong máy phát điện, máy nén khí, hệ thống điều tốc chính xác và các ứng dụng công suất lớn. Tuy nhiên, nó có mô-men khởi động thấp và cần thiết bị hỗ trợ khởi động như bộ kích từ hoặc biến tần.
Ngược lại, động cơ không đồng bộ có tốc độ quay nhỏ hơn tốc độ từ trường quay do hiện tượng trượt. Rotor của nó thường là loại lồng sóc hoặc dây quấn, không cần cấp nguồn trực tiếp. Ưu điểm của động cơ không đồng bộ là cấu tạo đơn giản, dễ bảo trì, mô-men khởi động cao và giá thành thấp. Vì vậy, nó được sử dụng rộng rãi trong quạt, bơm nước, băng tải, thang máy và các thiết bị gia dụng.
Nhìn chung, động cơ đồng bộ phù hợp với ứng dụng yêu cầu tốc độ không đổi và hiệu suất cao, trong khi động cơ không đồng bộ phổ biến hơn nhờ sự linh hoạt, giá rẻ và dễ sử dụng.
 Tải tài liệu PDF tại đây
Tải tài liệu PDF tại đây
1. Tổng quan
- Trước khi đi vào so sánh động cơ điện đồng bộ và không đồng bộ, chúng ta hãy cùng tìm hiểu sơ lược về khái niệm của 2 loại động cơ này. Cần chú ý, những thuật ngữ có tên gọi gần giống nhau, có liên quan đến công nghệ động cơ có thể dễ gây ra sự nhầm lẫn.
- Vì đôi khi nhiều thuật ngữ chỉ có thể áp dụng ở các trường hợp rất cơ bản chứ không phải hàm chứa một điều gì đó khác biệt và đột phá. Và một trong những thuật ngữ cần lưu ý đó chính là “động cơ đồng bộ” và “động cơ không đồng bộ”.
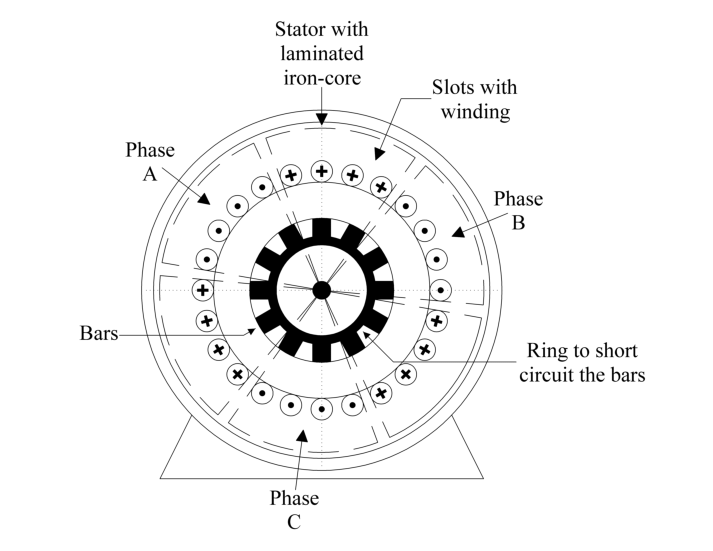
- Tất cả các động cơ hoạt động dựa trên nguyên tắc cảm ứng điện từ ngày nay (induction motor – tạm gọi tắt là động cơ điện từ) đều được xem là động cơ không đồng bộ. Bản chất không đồng bộ của quá trình vận hành động cơ điện từ đến từ sự trượt giữa tốc độ quay của từ trường kết hợp với tốc độ quay chậm hơn của rotor. Còn tại sao lại có sự trượt này, cần xem lại 1 vấn đề chuyên sâu hơn ở kết cấu bên trong của động cơ.
- Cái “lồng sóc” này bao gồm có nhiều thanh đồng hoặc thanh nhôm bố trí như hình ở trên. Chúng được nối với nhau bằng 2 vòng dẫn điện ở 2 đầu, làm cho các thanh ngắn mạch hoàn toàn với nhau. Còn phần lõi của rotor lại được làm bằng chất liệu thép.
- Bạn có thể nhìn thấy các rãnh được chạy dọc theo bộ phận rotor. Các rãnh này thực ra cũng có lý do tồn tại của nó, đặc biệt là số lượng rãnh của rotor thường nhỏ hơn của stator. Hơn nữa, số lượng rãnh trên rotor cũng phải tránh không được là ước của stator, để tránh được tình trạng mắc kẹt từ trường (còn gọi là magnetic interlock) trong khi khởi động động cơ.
- Bên cạnh động cơ roto lồng sóc, chúng ta cũng có thể thấy có rất nhiều loại động cơ sử dụng các cuộn dây. Lợi thế của kiểu cấu tạo này chính là có thể giảm tốc khởi động của động cơ nhờ vào các điện trở được đấu nối tiếp vào trong mỗi cuộn dây.
- Các cuộn dây sản sinh ra dòng điện do hoạt động theo kiểu bố trí vòng trượt. Khi động cơ đã đạt được tốc độ mong muốn, thì nó sẽ chuyển qua một vòng ngắn mạch, và khi đó, động cơ lại vận hành tương tự như một động cơ lồng sóc.
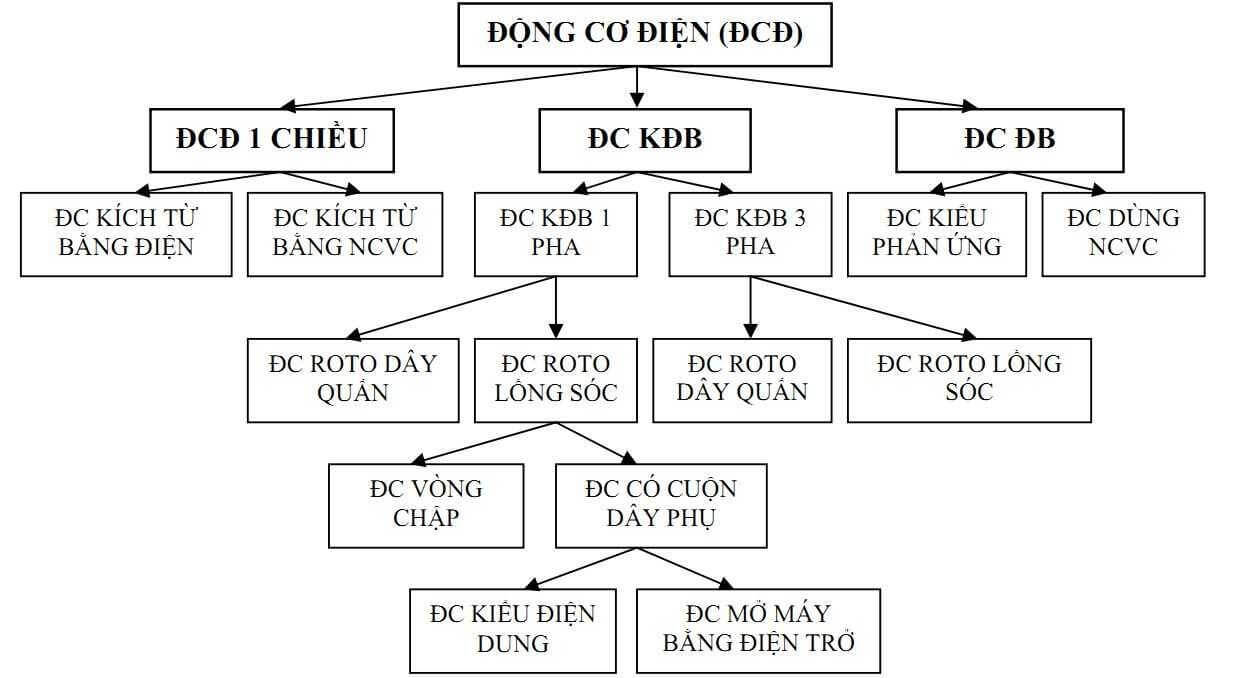
Bảng phân loại động cơ điện
- Động cơ đồng bộ và động cơ không đồng bộ là hai loại động cơ phổ biến nhất hiện nay. Chúng được ứng dụng rộng rãi trong đời sống thường ngày và các ứng dụng công nghiệp hiện đại. Mặc dù cả hai động cơ cùng hoạt động dựa trên nguyên lý cảm ứng điện từ, nhưng chúng lại có những điểm khác biệt đáng kể.
- Động cơ đồng bộ và không đồng bộ mặc dù đều là động cơ điện xoay chiều nhưng lại có những đặc tính hoạt động hoàn toàn khác nhau. Dưới đây là bảng so sánh chi tiết động cơ đồng bộ và không đồng bộ:
|
Tính năng |
Động cơ đồng bộ |
Động cơ không đồng bộ |
|
Cấu tạo roto |
Nam châm vĩnh cửu hoặc cuộn dây kích thích |
Lồng sóc (thanh nhôm hoặc đồng ngắn mạch) hoặc dây quấn |
|
Tốc độ |
Cố định và bằng tốc độ đồng bộ |
Thay đổi tùy thuộc vào tải và tần số nguồn |
|
Nguyên lý hoạt động |
Roto quay với tốc độ đồng bộ với từ trường quay nhờ vào tương tác giữa từ trường của stato và từ trường của roto (nam châm vĩnh cửu hoặc cuộn dây kích thích) |
Rôto quay chậm hơn tốc độ đồng bộ do hiện tượng cảm ứng điện từ. Dòng điện cảm ứng trong roto tạo ra từ trường tương tác với từ trường quay của stato, sinh ra mô-men xoắn. |
|
Hiệu suất |
Cao hơn, đặc biệt ở tải lớn |
Thường thấp hơn động cơ đồng bộ, nhưng đơn giản và bền bỉ hơn |
|
Momen khởi động |
Thấp, cần thiết bị khởi động hỗ trợ |
Cao, có thể khởi động trực tiếp |
|
Điều khiển tốc độ |
Khó, thường sử dụng biến tần để thay đổi tần số nguồn |
Dễ điều khiển tốc độ bằng biến tần, có thể điều chỉnh tốc độ trơn tru |
|
Kích thước và trọng lượng |
Lớn |
Nhỏ |
|
Ứng dụng thực tế |
Động cơ đồng bộ, với tốc độ quay ổn định và hiệu suất cao, là một lựa chọn lý tưởng cho nhiều ứng dụng công nghiệp và dân dụng. Ví dụ như máy tiện CNC, máy CNC, động cơ servo, máy phát điện, v.v. |
Chúng ta có thể thấy động cơ không đồng bộ trong các thiết bị gia dụng. Ví dụ như tủ lạnh, máy giặt, điều hòa, quạt điện, v.v. Bên cạnh đó, trong công nghiệp, động cơ không đồng bộ đóng vai trò quan trọng trong các máy móc sản xuất. Ví dụ như máy bơm, máy nén khí, v.v. |
- Bảng so sánh trên sẽ giúp bạn có một cái nhìn tổng quan chung về động cơ đồng bộ và không đồng bộ. Ngoài ra, việc lựa chọn loại động cơ phù hợp còn phụ thuộc vào nhiều yếu tố khác nhau. Ví dụ như môi trường làm việc, điều kiện vận hành, chi phí, v.v.
2. Động cơ điện đồng bộ
2.1. Khái niệm
- Động cơ đồng bộ (Tiếng Anh: Synchronous motor) là một loại động cơ điện xoay chiều đặc biệt. Trong đó, tốc độ quay của phần quay (rotor) luôn bằng với tốc độ quay của từ trường quay do phần tĩnh (stator) tạo ra. Nói một cách đơn giản, rotor và từ trường luôn đồng bộ với nhau, nên chúng ta gọi đó là động cơ đồng bộ.
- Động cơ đồng bộ chính là 1 cấu trúc động cơ vô cùng đặc biệt mà rotor chuyển động quay cùng tốc độ với tốc độ của từ trường stator (nên mới được gọi là đồng bộ). Một ví dụ nữa của động cơ đồng bộ chính là động cơ bước, thường được sử dụng nhiều trong các ứng dụng có liên quan đến quá trình điều khiển vị trí (chẳng hạn như tay vận hành robot của các nhà máy).
- Tuy nhiên, với sự phát triển trong những năm gần đây của các mạch điện tử công suất, chúng ta đã có thể tối ưu những thiết kế của động cơ đồng bộ để có thể sử dụng cho các ứng dụng khác với công suất cao hơn, chẳng hạn như máy quạt, máy sấy và thậm chí là động cơ của các loại xe địa hình.
- Động cơ đồng bộ là động cơ mà có tốc độ quay của rotor bằng tốc độ quay của từ trường. Tốc độ quay của rotor được xác định bằng công thức sau: v = 60 × f / n với v là tốc độ của rotor (đơn vị rpm), f là tần số của dòng điện xoay chiều vào (bằng Hz) và n là số cặp cực từ.
2.2. Cấu tạo

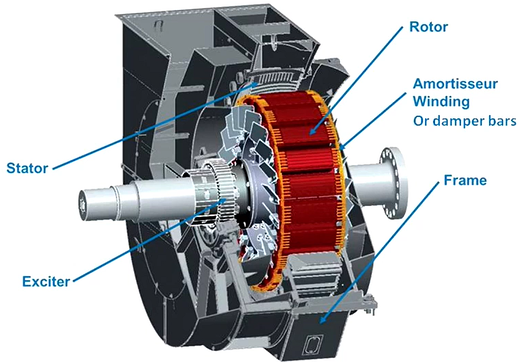
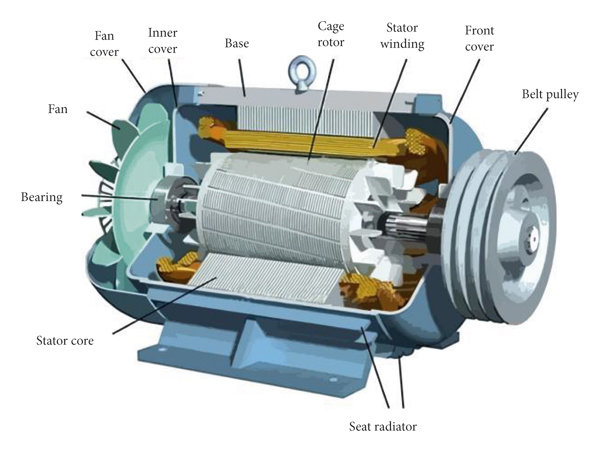
- Động cơ đồng bộ được cấu tạo từ hai phần chính là stator và rotor.
- Stator: Là phần tĩnh của động cơ, bao gồm một lõi thép được ghép từ các lá thép kỹ thuật điện. Trên lõi thép này, các rãnh được đục để đặt dây quấn stato. Khi dòng điện ba pha chạy qua các dây quấn stato, chúng sẽ tạo ra một từ trường quay.
- Rotor: Là phần quay của động cơ. Có hai loại rotor chính là rotor cực lồi và rotor kiểu cuộn dây.
- Ngoài ra, động cơ còn có các thành phần khác như vòng bi, trục và vỏ máy.
2.3. Ưu điểm
- Động cơ đồng bộ được đánh giá cao và được ứng dụng rộng rãi trong nhiều lĩnh vực nhờ vào những ưu điểm vượt trội sau:
- Tốc độ quay của roto luôn bằng với tốc độ quay của từ trường, đảm bảo hoạt động ổn định và chính xác.
- Động cơ đồng bộ có hiệu suất cao, đặc biệt ở tải nặng. Điều này có nghĩa là động cơ chuyển đổi hầu hết năng lượng điện thành cơ năng, giảm thiểu tổn thất năng lượng.
- Cấu tạo đơn giản, ít bộ phận chuyển động giúp động cơ đồng bộ có độ bền cao và ít hỏng hóc.
- Có thể hoạt động tốt trong môi trường có nhiệt độ cao, độ ẩm cao và các điều kiện khắc nghiệt khác.
- Có thể hoạt động ở hệ số công suất cao, giúp cải thiện chất lượng điện năng của hệ thống.
2.4. Nguyên tắc hoạt động
- Nguyên tắc hoạt động của động cơ đồng bộ dựa trên sự tương tác giữa từ trường quay do stato tạo ra và từ trường của rotor. Khi dòng điện ba pha được cấp vào các pha dây quấn stato, một từ trường quay sẽ hình thành bên trong lòng động cơ.
- Tốc độ quay của từ trường này được xác định bởi công thức N = 60f/p. Trong đó:
- N: Tốc độ đồng bộ (vòng/phút)
- f: Tần số của dòng điện cấp vào (Hz)
- p: Số cặp cực của động cơ
- Như vậy, tốc độ quay của từ trường hoàn toàn phụ thuộc vào tần số của nguồn điện và số cặp cực của động cơ. Rotor, với các cực từ được kích từ, sẽ cố gắng quay để đuổi kịp và luôn cùng chiều với từ trường quay. Khi roto đạt tới tốc độ đồng bộ, lực điện từ cân bằng với lực cản và động cơ hoạt động ổn định.
2.5. Ứng dụng
- Động cơ đồng bộ, với tốc độ quay ổn định và hiệu suất cao, là một lựa chọn lý tưởng cho nhiều ứng dụng công nghiệp và dân dụng. Ví dụ như máy tiện CNC, máy CNC, động cơ servo, máy phát điện, v.v. Nhờ đó, chúng không chỉ nâng cao hiệu suất sản xuất mà còn giúp tiết kiệm năng lượng và giảm chi phí bảo trì, mang lại lợi ích kinh tế lâu dài.
3. Động cơ điện không đồng bộ
3.1. Khái niệm
- Động cơ không đồng bộ (Động cơ cảm ứng) (Tiếng Anh: Induction motor) là một loại động cơ điện xoay chiều hoạt động dựa trên nguyên lý cảm ứng điện từ. Đặc điểm nổi bật của động cơ này là tốc độ quay của phần tử quay (rotor) luôn chậm hơn so với tốc độ quay của từ trường do phần ứng (stator) tạo ra. Chính vì sự chênh lệch tốc độ này mà động cơ được gọi là “không đồng bộ”.
- Động cơ không đồng bộ là động cơ điện hoạt động với tốc độ quay của Rotor chậm hơn so với tốc độ quay của từ trường Stator.Ta thường gặp động cơ không đồng bộ Rotor lồng sóc vì đặc tính hoạt động của nó tốt hơn dạng dây quấn.
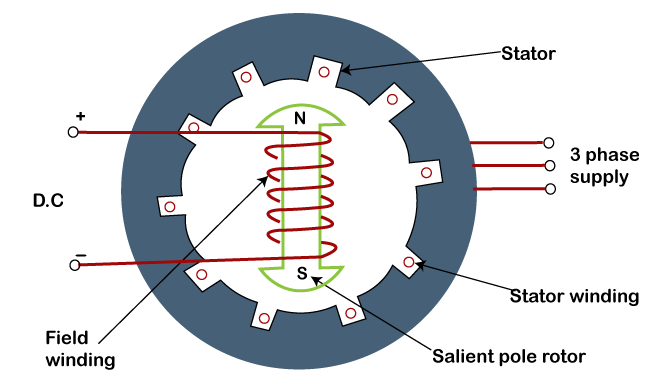
- Stator được quấn các cuộn dây lệch nhau về không gian (thường là 3 cuộn dây lệch nhau góc 120°). Khi cấp điện áp 3 pha vào dây quấn, trong lòng Stator xuất hiện từ trường Fs quay tròn với tốc độ n1=60 × f / p, với p là số cặp cực của dây quấn Stator, f là tần số.
- Từ trường này móc vòng qua Rotor và gây điện áp cảm ứng trên các thanh dẫn lồng sóc của rotor. Điện áp này gây dòng điện ngắn mạch chạy trong các thanh dẫn. Trong miền từ trường do Stator tạo ra, thanh dẫn mang dòng I sẽ chịu tác động của lực Bio-Savart-Laplace lôi đi. Có thể nói cách khác: dòng điện I gây ra một từ trường Fr (từ trường cảm ứng của Rotor), tương tác giữa Fr và Fs gây ra momen kéo Rotor chuyển động theo từ trường quay Fs của Stator.
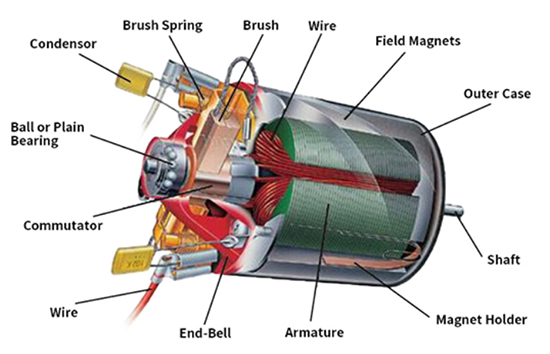
3.2. Cấu tạo
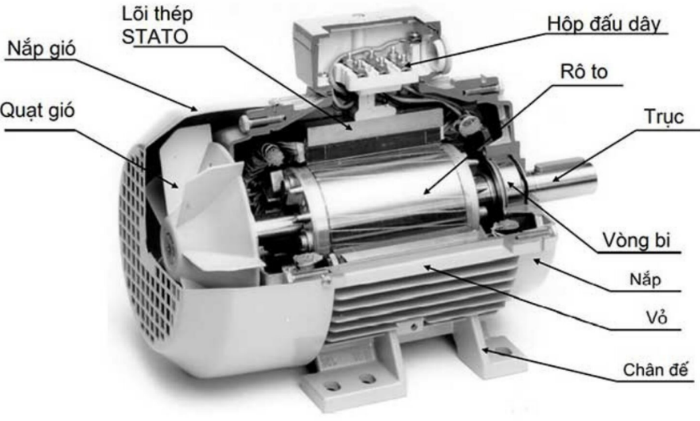
- Động cơ không đồng bộ có cấu tạo gồm hai phần chính: Stator và Rotor
- Stator:
- Là phần tĩnh, được đặt cố định bên ngoài. Stator gồm các rãnh đặt các cuộn dây quấn. Khi cấp điện vào các cuộn dây này, sẽ tạo ra từ trường quay.
- Lõi thép: được ép trong vỏ máy làm nhiệm vụ dẫn từ. Lõi thép stato hình trụ do các lá thép kỹ thuật điện được dập rãnh bên trong ghép lại với nhau tạo thành các rãnh. Mỗi lá thép kỹ thuật đều được phủ sơn cách điện để giảm hao tổn do dòng xoáy gây nên.
- Dây quấn: được làm bằng dây đồng bọc cách điện, đặt trong rãnh của lõi thép
- Vỏ máy: được làm bằng gang hoặc nhôm để cố định máy trên bệ và lõi thép. Còn có nắp máy và bạc đạn…
- Rotor:
- Là phần quay, đặt bên trong stator. Rotor có thể là dạng lồng sóc (dùng các thanh dẫn điện ngắn mạch với nhau) hoặc dạng dây quấn (có các cuộn dây quấn giống như stator).
- Lõi thép: lá thép được dùng như stato. Lõi thép được ép trực tiếp lên lõi máy hoặc lên giá roto của máy.
- Roto: roto lồng sóc và roto dây quấn.
- Roto chia làm 2 loại: cực lồi và cực ẩn
3.3. Ưu điểm
- Động cơ không đồng bộ là loại động cơ điện phổ biến nhất hiện nay. Loại động cơ này được ưa chuộng bởi vì:
- Cấu tạo đơn giản, ít bộ phần chuyển động, không cần chổi than và khả năng chịu tải tốt.
- Dễ vận hành, không yêu cầu kỹ thuật cao và ít hư hỏng.
- Khởi động trực tiếp, nhanh chóng và không cần thiết bị khởi động phức tạp.
- Đảm bảo chất lượng sản phẩm, tối ưu hóa việc sử dụng điện năng.
- Giảm thiểu ma sát, tăng tuổi thọ và độ tin cậy.
- Giá thành hợp lý với vật liệu sản xuất phổ biến và công nghệ hiện đại.
- Không gây tiếng ồn lớn và giảm nguy cơ cháy nổ.
- Ứng dụng đa dạng, bao gồm cả công nghiệp và sinh hoạt.
3.4. Nguyên tắc hoạt động
- Động cơ không đồng bộ hoạt động dựa trên hiện tượng cảm ứng điện từ. Khi cấp điện xoay chiều vào các pha dây quấn stato, một từ trường quay sẽ được tạo ra bên trong động cơ. Từ trường này cắt qua các thanh dẫn trên rotor, tạo ra dòng điện cảm ứng. Chính dòng điện cảm ứng này tương tác với từ trường quay, sinh ra lực điện từ kéo theo rotor quay.
- Công thức N = 60f / p × (1-s) là công thức tính toán tốc độ của động cơ không đồng bộ. Trong đó:
- N: Tốc độ quay của rotor (vòng/phút)
- f: Tần số của nguồn điện (Hz)
- p: Số cặp cực của động cơ
- s: Độ trượt (slip)
- Từ công thức trên, ta thấy rằng tốc độ quay của rotor phụ thuộc vào tần số của dòng điện cấp vào, số cặp cực của động cơ và độ trượt. Độ trượt lại quyết định đến mô-men xoắn của động cơ. Khi tải tăng, độ trượt tăng lên, mô-men xoắn tăng lên để đáp ứng nhu cầu tải.
3.5. Ứng dụng
- Chúng ta có thể thấy động cơ không đồng bộ trong các thiết bị gia dụng. Ví dụ như tủ lạnh, máy giặt, điều hòa, quạt điện, v.v. Bên cạnh đó, trong công nghiệp, động cơ không đồng bộ đóng vai trò quan trọng trong các máy móc sản xuất. Ví dụ như máy bơm, máy nén khí, v.v. Ngoài ra, chúng còn được ứng dụng trong giao thông vận tải như tàu điện, xe điện.
Write a comment